")






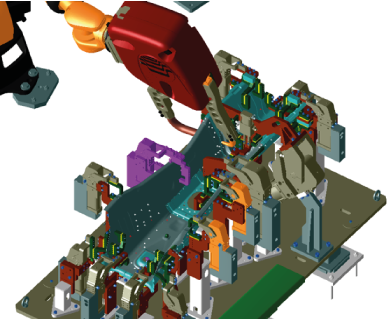 La prima fase riguarda l’importazione nello stesso ambiente di tutti i gruppi che concorrono a formare la cella di saldatura. Si verificano così gli ingombri statici effettivi, rilevando eventuali interferenze dovute a errati posizionamenti o errori di progettazione.
La prima fase riguarda l’importazione nello stesso ambiente di tutti i gruppi che concorrono a formare la cella di saldatura. Si verificano così gli ingombri statici effettivi, rilevando eventuali interferenze dovute a errati posizionamenti o errori di progettazione.
La parte fondamentale è incentrata sulla simulazione e la movimentazione di tutti gli organi mobili delle attrezzature e dei robot. Con i moderni software è possibile verificare se i punti di saldatura posizionati in fase di processo sono effettivamente realizzabili ovvero se vi è il giusto spazio per far passare la pinza di saldatura.
In caso il sistema rilevi delle interferenze è necessario procedere alla modifica degli elementi in gioco; si crea quindi una retroazione tra la fase di progettazione e la fase di verifica che dovrà necessariamente portare ad un prodotto realizzabile fisicamente. Ovviamente esistono bracci antropomorfi prodotti da case diverse che differiscono gli uni dagli altri sia per le possibilità di movimento che per le forze d’inerzia in gioco. Per sopperire a tale limite ogni robot è dotato di un programma controllore il quale consente di ricreare virtualmente i movimenti esatti. Una volta verificata la fattibilità del processo il programma di validazione permette di estrapolare i codici di programmazione da inserire nell’unità di controllo del braccio robotizzato (off-line). Questi codici andranno verificati passo-passo una volta schierata la linea perché eventuali errori nel posizionamento relativo tra attrezzature e robot creano divergenze tra la posizione teorica e quella reale raggiunta dagli elettrodi.Esempio di pinza per la saldatura a punti Editor per la configurazione degli snodi rappresentanti le articolazioni corporee Esempio di problematica rilevata mediante le analisi ergonomiche.